原创:蓝海星蓝海星智库
引言
目前,水下战的探测方式正从“平台密集型”向“传感器密集型”转变,即在警戒监视海域内大量布放传感器并组网,各网络节点间通过可靠的通信手段进行数据交换、分发和汇聚,根据多个传感器获取的信息对目标探测、定位、跟踪和分类识别。近年来,除了美国发展的海网(Seaweb)、近海水下持续监视网(PLUSNet)、深海主动探测系统(DWADS)等多型军用水下网络外,美国综合海洋观测计划(OOI)、加拿大海王星海底观测网(NEPTUNE)、日本地震和海啸海底观测密集网(DONET)和欧洲海洋观测网(ESONET)等民用水下网络也已广泛用于海洋数据采集、污染预测、远洋开采、海洋监测等方面。
水下网络节点定位是水下网络关键支撑技术,利用水下网络中已定位节点的位置信息,确定其他未定位节点位置信息。水下网络由普通水下传感器节点、UUV、水面浮标和船上基站等设备组成。一般来说,常用UUV、滑翔者等已定位的节点(锚节点),向其他未定位节点传输位置信息,未定位节点根据信息到达时间和贝叶斯准则进行节点位置和范围计算,并将其坐标与检测到的数据一起发送到基站或中央服务器。主要特点包括:不能直接使用GPS;信道带宽窄,不能使用通信开销大的协议;节点随水流移动。这给水下节点定位带来了极大困难。原有的陆地定位技术不能直接用于水下定位,需要开发适用于水下定位特点的节点定位技术。
水下定位主要有两种方法:水下精确定位法与水下区域定位法。前者是水下定位中最常用的定位方法,后者应用在无需精确定位目标坐标的场景,例如鱼虾群、污染水域等。本文阐述水下网络节点定位方法的基本概念、对比分析几种定位方法、描述了水下网络定位的军事应用及目前定位技术亟待解决的问题。
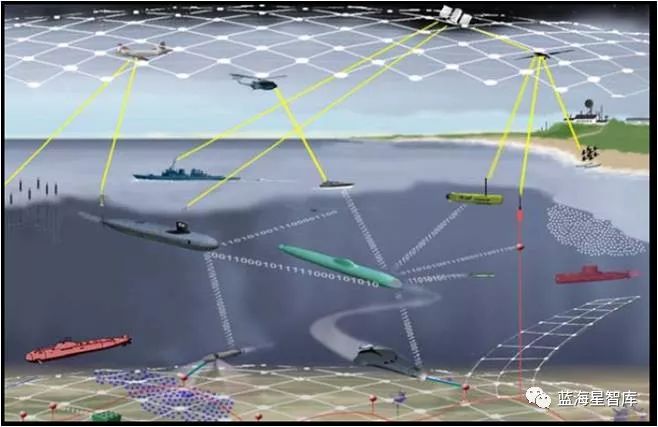
水下网络示意图
一、水下精确定位法
水下精确定位法可确定水下目标的坐标,包括二维和三维定位。
1、二维水下节点定位方法
二维水下节点定位方法主要对部署深度已知的节点进行平面内定位,可分为距离相关水下定位和距离无关水下定位,其中前者精度较高。
(1)距离相关水下定位
距离相关水下定位算法中,待测节点使用声波测距技术估算与锚节点之间的相对距离和方位,然后通过距离相关算法计算节点的位置。这种方法精度较高,用于多数水声网络。距离相关算法可根据所用锚节点的布放方式,分为固定锚节点和移动锚节点两种。
固定锚节点是布放在水中、相对位移较小的可定位设备,能将自身获取的定位信息向水下广播。目前固定锚节点距离相关定位算法主要研究水下节点如何利用固定锚节点的位置广播信息确定自身位置。2006年,美国伍兹霍尔海洋研究所应用海洋物理与工程系与密西西比州的斯坦尼斯海军海洋环境研究中心提出的“范式”(PARADIGM)定位法用6个水面浮标节点和简单的三边定位算法来定位方圆20km、水下17m范围内的自主潜航器(UUV)。葡萄牙系统与机器人研究所高级研究中心提出“GPS智能浮标”(GIBs)定位法,用电缆或光纤连接具有位置信息的水面浮标和水中移动节点,再用三边测量法计算节点位置。2009年,韩国光州科技学院提出用4个漂浮在海面的远程通信锚节点位置信息和多维尺度分析(MDS)法计算水下节点位置。近年来,利用更少的锚节点实现高精度水下定位、降低算法复杂度,成为新的研究重点。马来西亚沙捞越大学2008年提出seed-node算法,利用一个锚节点就实现了水声传感器网络节点的相对定位;韩国浦项科技大学利用信号的方向性,提出用两个锚节点实现水声传感器网络节点的定位方法。
相对于固定锚节点的定位算法,移动锚节点定位算法的网络布放方式灵活、覆盖范围广,降低了锚节点费用和能源等对水下网络定位的影响,并能配合水下网络节点漂移,是目前水下网络定位技术研究的热点。英国剑桥大学、美国麻省理工学院、美国海岸警卫队等多家机构合作设计出一种利用GPS进行水下定位的“智能水面浮标系统”(ASC)。该系统用一组能获取GPS定位信息的无人潜航器或无人水面艇。
作为移动锚节点。2007年土耳其伊斯坦布尔技术大学、美国加州大学洛杉矶分校提出用UUV和GPS联合定位的方法。由UUV在水面获取GPS坐标后,按预定轨迹下沉,并通过罗盘和航位推测法按照预设路线航行,最后定期浮出水面修正位置信息。2008年,中国海洋大学和香港科技大学联合提出了一种分布式水下定位方法—使用定向信标定位法,用UUV作为移动锚节点,向普通节点发送信号,降低总定位能耗(包括锚节点广播其位置信息的能耗、锚节点和未定位节点识别相邻节点数量等信息的能耗)和通信开销。九江大学提出了一种通过建模噪声信号寻找水下声信号位置的方法,用速度和声压水听器阵列进行二维定位。
(2)距离无关水下节点定位技术
距离无关定位算法不需要节点间的距离或角度信息,仅根据网络连通性等信息估算节点位置。常用的距离无关定位算法依靠三角测量定位,即测量待测节点与两个已知锚节点间的三角形连线确定坐标。这种方法不依赖额外的测距设备,具有简单、经济等优点,但测量误差较大、定位精度较低,不适用于需要精准定位的军事领域。
2、三维水下定位方法
三维水下定位方法与二维定位相比,增加了深度方向的定位信息。根据节点是否具有移动性,三维水下定位方法包括静态定位算法、动态定位算法和混合定位算法。
(1)静态三维水下节点定位
静态三维水下节点定位类似于二维定位中的固定锚节点定位,定位节点位置基本不变,为其他未定位节点提供位置信息。
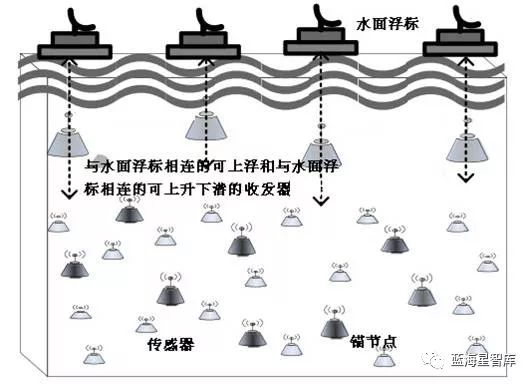
利用可拆卸可浮沉收发器的定位方法
2007年,美国康涅狄格大学提出了一种分层定位方法,使用三维递归距离估计法进行定位。这种方法虽适用于大型水下网络,具有较低的通信开销,但需大量的锚节点,同时水下节点的移动对定位精度也有较大影响。2008年,土耳其伊斯坦布尔技术大学和美国加州大学洛杉矶分校提出了“自沉降浮标”定位法,使用可沉降浮标上浮到水面接收GPS信号确定自身坐标,然后下潜向未定位的传感器节点广播坐标、时间、最大潜水深度、跳数等信息。2009年,上海交通大学、英国斯旺西大学提出一种利用可拆卸浮沉收发器的分级、分布式定位方案,减少移动锚节点应用的限制,但由于未考虑水流和漂移的影响,不适用于大规模网络。
(2)动态三维水下节点定位
2011年美国康涅狄格大学提出能预测移动性的可扩展定位方案,用水下传感器节点预测移动模式,是一种可用于大型移动传感器网络的分布式定位方案。其中,水面浮标通过自身配备的GPS确定位置,锚节点与水面浮标通信获得初始位置,然后通过线性预测法估算运动模式和当前坐标。普通节点依靠锚节点或相邻节点的定位信息到达时间、坐标置信度值等信息进行定位。这种方法减少了通信开销并具有较低的误码率,但使用新的定位节点作为参考或锚节点,会产生较大的积累误差。此外,康涅狄格大学还提出利用历史信息的启发式辅助预测方法,根据通信的平均持续时间和两次通信的时间间隔、两个节点最后一次通信的时间及通信频率等进行定位,但效果一般。
与固定锚节点定位相比,移动锚节点定位更适合水下网络,是水下网络定位技术的新方向,但目前还没有有效的移动节点定位方法。
二、水下区域定位法
水下区域定位法仅确定水下网络节点所在的区域,应用在无需精确定位目标坐标的场景,例如鱼虾群、污染水域等。
2006年,新加坡信息通讯研究所提出一种区域定位方案,使用锚点定位普通节点。区域定位方案有不同的种类,其中二维区域定位法简便且成本低,但这种方法使用静态锚节点且未考虑水深因素,不适合深水和三维水下网络。2009年,上海交通大学、英国斯旺西大学提出三维区域定位方法,可实现三维空间定位。与二维区域定位不同的是,三维区域定位定位需要使用大量的锚节点,布放在水下不同深度。这种方法由可拆卸浮沉收发器接收水面浮标的位置信息并广播,普通节点存储位置信息、锚节点的功率级别以及深度信息,并发送到汇聚节点用于最终位置估计。
三、军事领域的发展和应用
水下网络具有密集型、随机分布、无人值守的特点,在未来战争中具有广阔的应用前景。如利用水下网络及时、准确地探测爆炸将为军队提供宝贵的反应时间,最大可能地减小伤亡。在特定区域部署带有生化传感器的网络,可实现生化探测和预防,减少人员伤亡。
1、拦截、攻击
构筑区域水下电子侦察系统可提供实时情报信息,监视该区域内军事据点和设施的动向以及同外界的往来。同时,该系统可利用传感器上的接收器截获对方的各种水下信号,获取敌方情报。由于传感器节点可用作实施网络攻击的可能入口,因此可在战场上用作伪冒节点接人敌方传感器网络,攻击其战术指挥控制通信网络。
2、武器导引
水下网络也可作为智能弹药和超高精度精确攻击水雷的导引网络,利用传感器接收和定位目标信息,为水下智能导弹和超高精度攻击导弹引导、锁定目标,提高武器精度。
3、水下探测
微小型水下传感器可由小型潜艇携带到战区释放,隐藏在海底泥沙中,只露出探测器,增强隐蔽性的同时减少传感器的漂移。这种传感器适于在敌方战区海域内探测敌人水上和水下的部署,如与水雷配合,还可自主选择攻击目标和时机等。
 微信公众号
微信公众号