
一、概述
测定煤堆储量是火电厂、煤矿等单位的常规工作,测定储量的关键在于测定体积。对于不规则的煤堆体积测量,早期的方法是使用推土机对煤堆进行整形,再人工用皮尺丈量,或用经纬仪视距导线测量等方法来完成,投入的人力物力较多,且误差较大。
随着全站仪技术的普及,大家逐渐使用全站仪进行测量。但仍需要在测量前将煤堆顶面尽可能的推平,再使用全站仪测量煤堆地面和顶面范围,内容包括平面坐标和高程,然后再通过计算得出体积。
激光雷达技术的发展及硬件软件的快速更新迭代,使得测定煤堆储量的工作有了更便捷的手段。本文介绍使用无人机激光雷达设备进行煤堆体积测量,不需要对煤堆整形即可快速获取煤堆体积。
二、设备选用
无人机激光雷达扫描系统—LiAir 100
LiAir 100无人机激光雷达扫描系统是一款的轻型激光雷达点云数据采集系统 ,一体化集成集激光雷达扫描仪、GNSS 和 IMU 定位定姿系统及存储控制单元,可实时、 动态、海量采集高精度点云数据及丰富的影像信息,通过配套的LiAcquire 机载激光雷达地面站软件,可快速获取高精度的煤堆三维信息数据。
产品优势
高精度:精度满足 1:1000 地形测图需求;
高效率:单机日测 2平方公里;
系统稳定:安全作业时长累计超 8000 小时;
操作简单:支持一键式流程化数据采集,一键起降自动执行航线;
实时测量:作业过程支持实时量测地物坐标、距离及高程,支持应急救援快速响应;
实时监测:支持点云数据、POS参数、设备状态在作业过程实时显示;



| | 标准版
| 高精度版
|
重要参数
| 绝对精度
| ±12cm
| ±10cm
|
相对精度
| ±5cm
| ±5cm
|
重量
| 3.3kg
| 3kg
|
扫描范围
| 100m
| 100m
|
垂直视野
| -30°~+10°
| -30°~+10°
|
水平视野
| 360°
| 360°
|
相机
| 可选配
| 可选配
|
惯导系统
| GNSS
| GPS,GLONSS,BD
| GPS,GLONSS,BD
|
姿态精度(后处理)
| 0.1°(1σ)
| 0.015°(1σ)
|
方位角精度(后处理)
| 0.1°(1σ)
| 0.08°(1σ)
|
激光雷达单元
| 激光传感器
| Velodyne HDL-32E
|
安全等级
| 1级
|
测量范围
| 100m
|
测距精度
| ±2cm
|
垂直视野
| -30°~+10°
|
水平视野
| 360°
|
扫描频率
| 5Hz~20Hz
|
角分辨率(垂直)
| 1.33°
|
角分辨率(水平)
| 0.1°~0.4°
|
激光波长
| 903nm
|
最大有效测量速率
| 700,000Pts/sec
|
搭载平台
| 无人机平台
| DJI M600 PRO
|
轴距
| 1133mm
|
尺寸
| 1668 mmX 1518 mmX 727 mm
|
重量
| 9.5kg
|
起飞重量
| 15.5kg
|
续航时间
| 空载:32min
|
作业时间
| 3.2kg载荷:21min
|
最大风抗性
| 8m/s
|
最大速度
| 18m/s(无风)
|
巡航半径
| 2Km
|
使用温度
| -10℃~ 40℃
|
电池
| 4500mAh*6
|
适配软件
| 航线规划
| LiPlan 激光雷达地面站软件
|
设备状态监控、数据解算
| LiAcquire 机载激光雷达操控软件
|
点云数据处理分析(选配)
| LiDAR360 点云数据处理分析软件
|
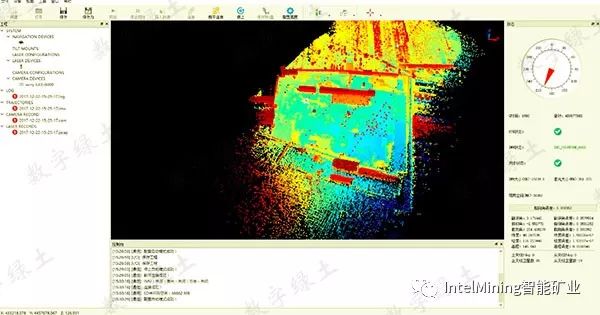
控制和解算软件:LiAcquire机载激光雷达地面站软件,进行设备控制/实时监测
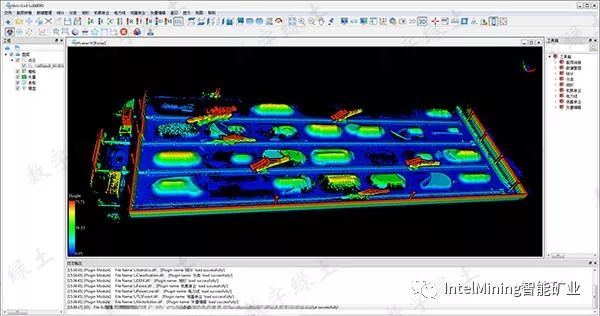
数据处理软件—LiDAR360点云数据处理分析软件
三、作业流程
外业数据采集过程


煤堆体积测量流程
数据解算完成后,直接将点云数据导入LiDAR360软件,若采集的数据有噪声点,需先对点云数据进行去噪处理。
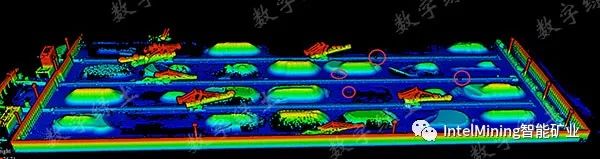
去噪前 ↑

去噪后 ↑
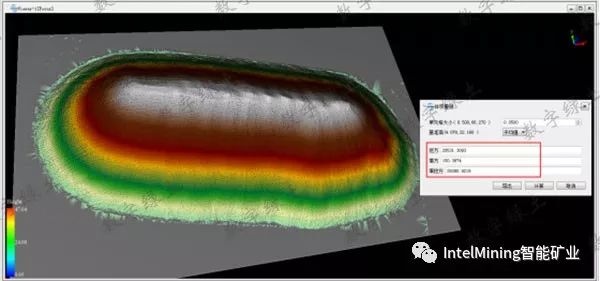
去噪后直接利用体积量测工具即可进行煤堆体积量测。通过人工给定测量基准面和测量范围,20秒内即可计算得到煤堆的体积。
“IntelMining智能矿业”公众号成立于2018年5月12日。在新时代科技浪潮的洗礼下,我们立志于做矿业领域新科技的观察者、实践者、引领者!
众所周知,采矿行业是最为古老而传统的行业之一。由于种种条件的限制,其本身即带有一定的保守。随着时代的发展,互联网、人工智能、云计算、大数据、区块链等新科技已逐渐同传统行业相“+”,并呈现出崭新的产业发展面貌。然而,采矿业特别是我国以煤炭为主角的采矿业仍不免“傻大黑粗”的低端形象,并且行业人才的流动能力也颇有局限性。好在,矿业人也并非都是因循守旧的,当前行业内已经展露出对新技术、新思维、新理念的兴趣,智慧矿山、智能采矿等先进概念已勃然兴起。
本公众号旨在立足于新时代,从不同角度对新兴科技进行观察,力争以全新的视角来审视和把握能够对矿业发展产生积极影响的新技术,我们的愿景是“科技赋能矿业,让采矿酷起来”!
| | 标准版
| 高精度版
|
重要参数
| 绝对精度
| ±12cm
| ±10cm
|
相对精度
| ±5cm
| ±5cm
|
重量
| 3.3kg
| 3kg
|
扫描范围
| 100m
| 100m
|
垂直视野
| -30°~+10°
| -30°~+10°
|
水平视野
| 360°
| 360°
|
相机
| 可选配
| 可选配
|
惯导系统
| GNSS
| GPS,GLONSS,BD
| GPS,GLONSS,BD
|
姿态精度(后处理)
| 0.1°(1σ)
| 0.015°(1σ)
|
方位角精度(后处理)
| 0.1°(1σ)
| 0.08°(1σ)
|
激光雷达单元
| 激光传感器
| Velodyne HDL-32E
|
安全等级
| 1级
|
测量范围
| 100m
|
测距精度
| ±2cm
|
垂直视野
| -30°~+10°
|
水平视野
| 360°
|
扫描频率
| 5Hz~20Hz
|
角分辨率(垂直)
| 1.33°
|
角分辨率(水平)
| 0.1°~0.4°
|
激光波长
| 903nm
|
最大有效测量速率
| 700,000Pts/sec
|
搭载平台
| 无人机平台
| DJI M600 PRO
|
轴距
| 1133mm
|
尺寸
| 1668 mmX 1518 mmX 727 mm
|
重量
| 9.5kg
|
起飞重量
| 15.5kg
|
续航时间
| 空载:32min
|
作业时间
| 3.2kg载荷:21min
|
最大风抗性
| 8m/s
|
最大速度
| 18m/s(无风)
|
巡航半径
| 2Km
|
使用温度
| -10℃~ 40℃
|
电池
| 4500mAh*6
|
适配软件
| 航线规划
| LiPlan 激光雷达地面站软件
|
设备状态监控、数据解算
| LiAcquire 机载激光雷达操控软件
|
点云数据处理分析(选配)
| LiDAR360 点云数据处理分析软件
|
控制和解算软件:LiAcquire机载激光雷达地面站软件,进行设备控制/实时监测
 微信公众号
微信公众号