世界上第一台工业机器人诞生于20世纪60年代初期,它是由美国Unimation公司设计制造的,并在美国通用汽车公司投入工业化应用。随着机器人技术的飞速发展和对煤矿生产安全高效的要求,越来越多的不同结构类型的机器人逐步在煤矿行业中应用,目前研究最广泛的是在煤矿抗险救灾方面,但在实际应用方面还不尽如意。
一、煤矿探测与救灾机器人
中国矿业大学(北京)的贾瑞清教授针对薄煤层的工作环境,提出了一种用于薄煤层工作面设备安全监测的移动机器人平台的思路概念。唐山开诚机器人制造有限公司发明了一种煤矿井下胶带运输机巡视机器人,该机器人安装监测设备,靠皮带机上方的钢丝绳驱动机器人沿检测设备运作状况。中科院沈阳自动化研究所与鞍山凯信公司研制的煤矿井下探测机器人前后有两个红外线摄像头,初步实现了可视化,如图1(a)所示,其体积庞大,并不适宜在煤矿井下地形条件。沈阳新松机器人有限公司研制的煤矿井下救援机器人,如图1(b)所示,机器人安装照明装置和视频装置,采用光缆通信,具有一定的环境侦察能力,但未见实际应用报道。2006年6月,中国矿业大学研制的CUMT I型矿井搜救机器人,是我国第一台用于煤矿救援的机器人,如图1(c)所示,该机器人装备有低照度摄像机、气体传感器和温度传感器等设备。能够探测灾害环境,实时传回灾区的瓦斯、一氧化碳、粉尘浓度和温度,以及现场图像等信息;具有双向语音对讲功能,能够使救灾指挥人员与受害者进行快速联络,指挥受伤人员选择最佳的逃生路线;具有无线网络通讯功能;同时还携带有食品、水、药品、救护工具等救助物资,使受害者能够积极开展自救。
美国圣地亚智能系统与机器人中心研制的RATLER矿井救灾机器人,如图1(d)所示。该机器人采用轮式行走机构,有四个驱动轮构成,具有较强的机动性能,行驶速度较快,可实现远程控制,通过携带摄像头,通过无线传输将井下画面传输到井上,但其越障性能较差,只适合在较平坦的地形中行驶。
哈尔滨工业大学机器人研究所为唐山开诚电器有限公司研制了KRZ-I 型煤矿井下探测机器人,如图1(e)所示。该机器人为三节履带机构形式,分为驱动部分、摆臂部分和摆腿部分。控制系统分为井下机器人控制系统和井上控制盒遥控系统两部分。井下机器人控制系统实现机构运动控制、井下视频音频信号采集及温度、风速、CO、CH4传感器的数据采集。井上控制盒遥控系统用于接收井下传来图像及声音信息,并通过两个控制摇杆和控制按键对系统发出控制命令,实现对井下系统的遥控。其前后摆臂较长,不能回收到车体内,越障能力强,体积较大,质量较重接近200kg,并进行了防爆性能设计。可以携带照明装置和摄像装置,配备多种传感器,采用光纤通信实时传输信号,可以爬越30度斜坡,具有较强的地形适应能力。2011年,由唐山市质监局、唐山开诚集团组织编写了我国第一个关于矿用井下机器人的省级地方标准《矿用井下机器人技术规范》,填补了国内空白。西安科技大学提出了基于自主策略的煤矿救援机器人,由负责运载机器人的系统和救援机器人两部分构成。太原理工大学王铁教授带领的研究团队,研制的煤矿专用救灾机器人,携带双云台摄像机,能够通过无线方式进行数据、视频通讯和远程控制。
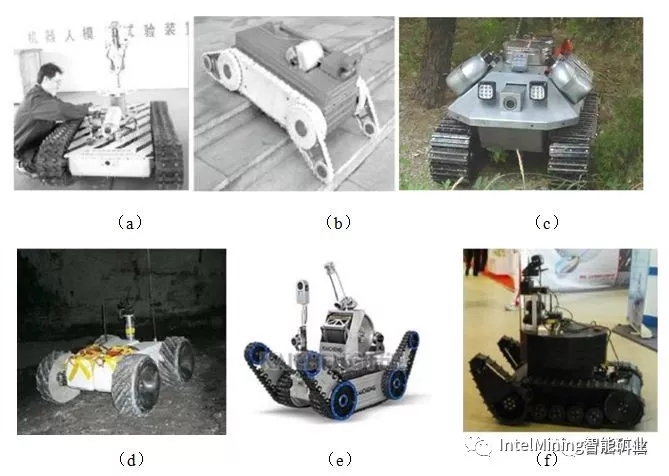
图1 探测与救灾机器人
中国矿业大学(北京)的范迅教授对矿井机器人构型进行了研究。从运动学角度分析了机器人运动规律及其最大越障能力。也有文献针对我国煤矿井下特殊环境,提出了移动机器人应具备的主要功能和特点,确定了专门针对煤矿领域应用的井下机器人设计的指导原则。
中国矿业大学(北京)的贾瑞清、周丹等人研制出了MMR-1型轮式机器人,并对机器人壳体进行了防爆性能设计,其可用于煤矿井下环境,如图2(a)所示,具有6个驱动轮,车体做成圆柱形,并对其控制策略进行了研究。中国矿业大学的李允旺对井下救援机器人的壳体进行了防爆性能设计,设计了多个防爆面,对该种结构的机器人防爆壳体设计提供了参考。提出了把静态正压防爆技术应用在煤矿救援机器人防爆设计上,如图2(b)所示,为矿井搜救机器人设计提供了新的思路。唐山开诚和哈尔滨工业大学发明了一种隔爆兼本安壳体,如图2(c)所示,可用于煤矿井下特殊环境。中国矿业大学葛世荣教授团队发明了用于煤矿井下搜救作业的隔爆型机器人平台,如图2(d)所示。

图2 煤矿用探测机器人
二、胶带运输机巡检机器人
唐山开诚机器人制造有限公司的ZL201120255206.0《煤矿井下胶带运输机巡视机器人》,本实用新型公开了一种煤矿井下胶带运输机巡视机器人。它包括煤矿井下胶带运输机巡视机器人本体,其特征在于:在机器人本体上安装用于胶带运输机的运行参数监测设备,温度传感器、烟雾传感器、影像传感器和甲烷传感器;以及带动整个煤矿井下胶带运输机巡视机器人沿着胶带机上方运行的带光纤的驱动钢丝绳、电滚筒、光纤滑环、防爆驱动电机、转速传感器、控制显示台、转向轮、托举轮。
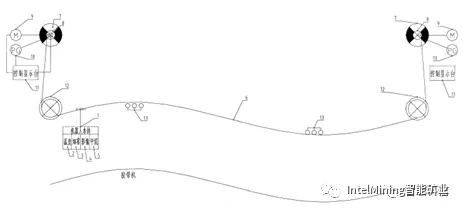
图3 开诚公司胶带输送机巡视机器人结构图
中国神华能源股份有限公司和神华神东煤炭集团有限责任公司的ZL201720221877.2《煤矿带式输送机巡检系统》与《煤矿井下胶带运输机巡视机器人》类似,采用固定设置于带式输送机上方的轨道,利用视频监控器获取带式输送机工作状态的视频信息,将视频监控器通过滑动装置设置于轨道上,在滑动装置的带动下沿轨道移动。信号收发器接收视频监控器发送的带式输送机工作状态的视频信息,并将视频信息发送至地面主机。
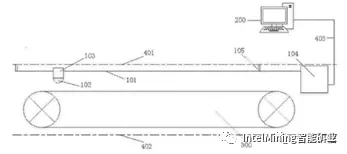
图4 神华神东带式输送机巡视系统结构图
中信重工开诚智能装备有限公司的ZL201410051619.5《一种矿用皮带检测装置》,包括机器人本体、传动系统、控制系统和通讯系统,机器人本体在柔性传动系统的作用下,能够实现从皮带运输机机头到机尾的全线范围内的移动巡检,解决了由于地压变形造成行走失效的关键性难题,能够连续采集、存储、传输现场的图像、声音、温度、烟雾等数据,通过对数据的分析,判断是否存在设备故障以及故障位置,适用于对平运皮带机、上运皮带机和下运皮带机的自动巡检,具有终点自动换向、限位停止、定点校正等功能,该装置体积小、结构紧凑、运行平稳,不影响巷道内的正常行人和皮带机的检修工作。
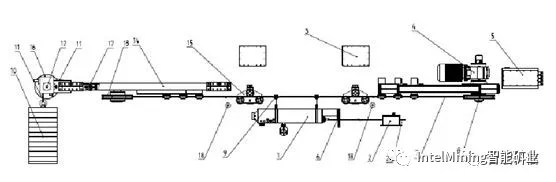
图5 中信重工开诚智能装备公司的矿用皮带检测装置图
中信重工开诚智能装备公司的裴文良等的《轨道式巡检机器人系统设计与应用》,论文详细介绍了轨道式巡检机器人系统的硬件组成,讨论了巡检机器人数据采集系统的功能与结构,介绍了控制系统的软件设计方法。叙述了一种巡检机器人用充电器闭锁装置,它可以对井下机器人进行充电,延长工作时间。该机器人系统可以取代人工检测、能及时发现故障,为带式输送机和其他设备的安全运行提供了可靠的保障。为了减少监测设备的投入、降低成本,同时达到对矿井带式输送机等设备的全面监控,开发了一种轨道式巡检机器人系统,该系统是集自动化、传感器、计算机、网络通信为一体的自动监控系统。
轨道式巡检机器人系统主要由驱动装置、供电装置、检测装置、自动充电插座装置和自动充电插头装置组成,驱动装置与轨道对中布置,供电装置与自动充电插座装置分别置于驱动装置的两侧,检测装置安装于整个系统的最底部,如图6(a)所示。巡检机器人驱动装置包括驱动轮、支撑轮、导向轮、驱动支架及夹紧机构,驱动轮、支撑轮及导向轮分别在驱动支架左右对称布置,驱动支架上布置有夹紧螺杆,其相对驱动支架对称布置。夹紧机构主要由夹紧臂、压缩弹簧、螺母及夹紧螺杆组成,驱动轮固定于夹紧臂上,夹紧臂的一端铰接于驱动支架上,另一端作为摆动端通过螺母安装于夹紧螺杆上,调节螺母,挤压压缩弹簧,使得对称布置的驱动轮实现相互夹紧的目的,如图6(b)所示。巡检机器人检测装置内包含有驱动电机,该驱动电机通过万向联轴器将动力传递给驱动装置,使得驱动轮转动。检测装置上安装速度、温度、烟雾、撕裂等传感器,可以对带式输送机进行全程实时监测监控。
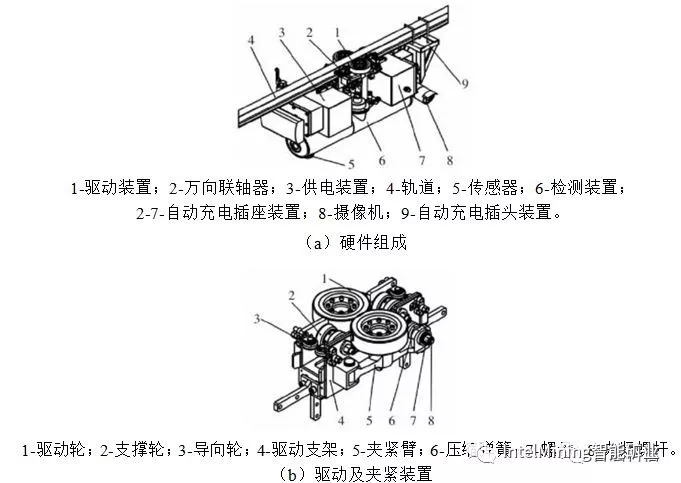
图6 轨道式巡检机器人及其组成图
中国矿业大学的ZL201410527247.9《一种带式输送机巡检系统的充电系统及方法》,适用于提供带式输送机巡检系统内各监测单元件运行所需的电量,主要包括实时充电单元和起始端充电单元。实时充电单元包括增速器发电机、充电电池、滚轮、转轴、轴承及轴承支座;起始端充电单元主要包括固定充电桩、支撑架和电磁铁。本发明在充分考虑带式输送机巡检系统正常运行的基础上,建立一套实现带式输送机巡检系统内各监测元件平稳、长时间运行的充电系统,延长带式输送机巡检系统续航能力,降低人工充电工作量。

图7 中国矿业大学带式巡检系统的充电系统图
天津华宁电子有限公司和兖州煤业股份有限公司鲍店煤矿共同申请的ZL201611054722.0《一种煤矿井下巡检机器人用自动充电装置》,包括移动端组件和固定端组件,移动端组件可沿导轨向固定端组件方向往复移动,移动端组件靠近固定端组件的一端设有电极插座,固定端组件靠近移动端组件的一端设有电极固定座,电极固定座上设有与电极插座匹配设置的电极插头,电极插头与电极插座的外圈设有隔爆组件;隔爆组件包括锁紧套和固定套,锁紧套设在移动端组件靠近固定端组件的一端且设在电极插座的外圈,固定套设在固定端组件靠近移动端组件的一端且设在电极插头的外圈,锁紧套与固定套之间可拆卸式固定连接。本发明具有隔爆功能,安全性高,而且可实现自动充电,自动断电,提高煤矿井下自动化程度。
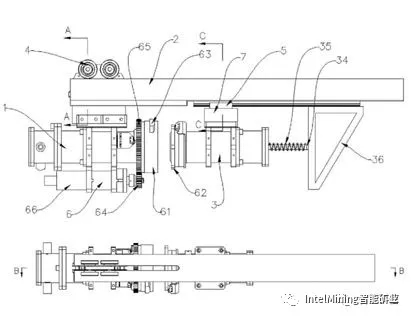
图8 天津华宁电子有限公司的井下巡检机器人自动充电装置图
深圳市朗驰欣创科技股份有限公司的ZL201610338813.0《轨道巡检机器人行走机构》,包括具有中空内腔的导轨,内腔中设有主动机构和从动机构,主动机构包括主动固定架、主动轴、主动轮及驱动组件,从动机构包括从动固定架、从动轴及从动轮。由于主动机构及从动机构均设于内腔中,其主动轮、主动轴、驱动组件、从动轮及从动轴均受到导轨的保护作用,降低各部件受损的可能性。使用时,启动驱动组件,巡检机器人将在主动轮的作用下,沿导轨前进,同时,带动从动轮沿导轨滑动,相比较现有驱动机构采用两个驱动轮同侧驱动的方式而言,其两个主动轮同一个主动轴驱动,两主动轮同步容易,不易出现打滑的情况,避免了左右轮子磨损不均匀的情况,降低维护成本。
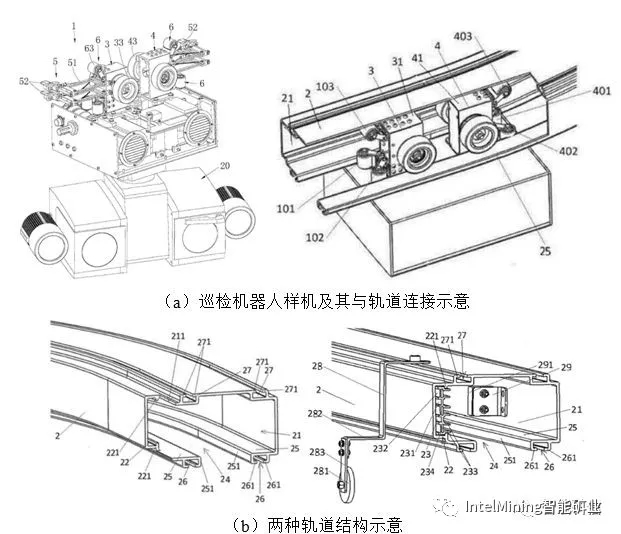
图9 深圳朗驰欣创公司轨道巡检机器人行走机构图
三、综采工作面巡检机器人
徐月红的ZL201620324442.6《一种煤矿巡检机器人》,包括本体和支撑杆,本体内腔的右端设有蓄电池,左端设有电机,电机通过皮带与皮带轮传动连接,皮带轮套接于转轴外表面的右端,转轴设于本体内腔的下端,转轴外表面的顶端设有第一滚轮,外表面底部的右端设有支撑腿,支撑腿的底部设有第二滚轮,本体外表面的右端设有报警器,本体外表面顶部的右端设有支撑杆,支撑杆的内腔从下往上依次设有GPS定位器、无线信号发射器、深度传感器、氧气浓度传感器和瓦斯传感器。该煤矿巡检机器人配置了摄像头,且通过旋转器和探照灯的共同作用,可使摄像头对周边环境更好的观察,方便控制室内人员对矿井内的了解。
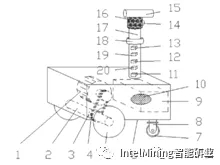
图10 一种煤矿巡检机器人
中国矿业大学《薄煤层综采工作面巡检机器人运动分析及试验研究》博士论文,为减轻薄煤层采煤工作面检修工人劳动强度,迫切需要设计一种具有可视化功能且适应薄煤层综采工作面环境的巡检机器人能代替或辅助工人日常巡检工作,满足工作面的日常巡检需要。通过分析并对比现有移动机器人的行走方式,确定了巡检机器人采用履带式行走方式,综合考虑薄煤层综采工作面环境要求及技术特点,通过对不同结构机器人特性分析,确定了采用四摇臂式履带结构作为巡检机器人行走机构的整体结构设计方案。在分析巡检机器人质心位置分布与前后摇臂倾角的关系基础上,对机器人的越障高度进行了优化分析,在无摇臂支撑越障时,最大越障高度为118.48 mm,而后摇臂支撑时越障高度为232.91 mm。要使机器人越过200 mm障碍,必须借助后摇臂辅助。
设计的巡检机器人整体结构如图11所示,由下部分的行走机构和上部分的操作手臂构成。行走机构是巡检机器人的载体,采用履带式驱动,前后各有两个摇臂构成,摇臂主要在越障时起辅助越障功能。操作手臂和机械手主要辅助工人做些简单维修操作功能,比如对液压支架管线管路整理、检查煤壁或顶板情况等。

图11 巡检机器人结构图
哈尔滨工业大学的ZL201710008322.4《一种煤矿综采工作面巡检机器人》,解决煤矿综采工作面没有长距离重复的巡视检测设备的问题。主动摩擦轮的轴线与被动摩擦轮的轴线平行设置,钢丝缆绳缠绕在主动摩擦轮和被动摩擦轮上,主动摩擦轮安装在主动摩擦轮支架上,被动摩擦轮安装在被动摩擦轮支架上,缆车轿厢通过缆车轿厢连接件安装在钢丝缆绳上,主动摩擦轮固定在驱动电机的输出轴上,敏感气体传感器、视觉和激光传感器、电池和防爆计算机均安装在缆车轿厢中,数个辅助支撑钢丝绳装置依次设置在封闭的钢丝缆绳中,且辅助支撑钢丝绳装置的两端分别支撑在钢丝绳的上下端,主动摩擦轮和被动摩擦轮的直径均为1m~2m,本发明用于煤矿综采工作面检查。

图12 哈工大巡检机器人结构图
山西科达自控股份有限公司的ZL201710435717.2《一种4G巡检机器人及巡检系统》,该4G巡检机器人,包括单轨轨道、车体和用于采集信息的挂载装置。车体包括可拆卸的车本体、至少2个行走组件、至少1个导向组件及至少1个转向组件,行走组件包括电机和由其驱动的主动轮;导向组件包括导向轮,转向组件包括转向轮。主动轮、导向轮与转向轮沿单轨轨道的2个侧壁滚动;挂载装置设于车体的下方。该巡检系统,包括:上述4G巡检机器人、安装支架和多个费接触式充电座。本发明用于井下作业的巡检与维护,使用时将其固定在巡检现场的侧壁上,其设计科学、结构紧凑、体积较小,因而移动灵活、巡检效率高,可以及时、准确的到达指定地点。
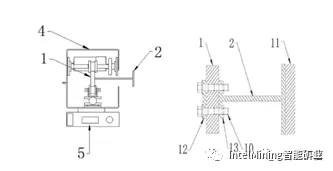
图13 4G巡检机器人结构图
根据报道,自2016年8月,黄陵矿业一号煤矿与北京天地玛珂电液控制系统有限公司合作,开始研究综采工作面移动监测系统。设计方案为:将高清摄像仪、红外线热成像摄像仪等设备集成一套新的监测系统,安装在综采工作面电缆槽前部的小型刮板运输机上,让刮板机链条带动监测系统在刮板机轨道上与采煤机同步运行,以替代传统的固定监测系统,采煤机司机只需在顺槽监控中心控制采煤机摇臂的升降,对液压支架自动跟机、刮板运输机运转进行实时监控,精准观察、测量滚筒与支架顶梁的间距。以测量管理信息平台为基础,研究出一种4分钟内实现高精度初始对准的技术。针对惯性导航系统在实际运行过程中受噪声干扰的问题,在巡检驱动电机上安装轴编码器,以精确测量惯性导航行走的距离,结合惯性元件测量数据滤波补偿方法,不断提高惯性导航系统在综采工作面巡检过程中的抗干扰能力和直线测量精度。系统用5分钟就可以对综采工作面进行一次全面巡检。

图14 黄陵一号煤矿综采工作面巡检机器人
四、发展前景
随着煤矿智能化生产程度的提高,各种煤矿井下机器人将会越来越广泛的应用,以上提及的煤矿探测与救灾机器人、胶带运输机巡检机器人、综采工作面巡检机器人将会不断完善与提高,最终实现煤矿智能化无人开采。
 微信公众号
微信公众号