
随着现代测绘技术的进步,矿山测量的数据量越来越多,成果要求越来越多样化,数字化矿山管理和高效化矿山生态监测已经成为必然要求。传统遥感技术在矿山测绘中存在无法获取垂直结构、精度较低和时效性较差等劣势,激光雷达具有主动性强、穿透性强、扫描速度快和精度高等特点,可以弥补传统遥感技术的不足。

北京数字绿土科技有限公司专注激光雷达与影像融合技术,精于激光雷达、无人机、SLAM、摄影测量等技术实现三维空间实景的准确感知。自主研发了LiAir (机载激光雷达扫描系统)、LiBackpack(背包激光雷达扫描系统)、LiPod(架站式激光雷达扫描系统)、LiMobile(车载激光雷达扫描系统)等多平台化的高精度三维信息采集设备,兼顾通用平台和行业扩展的点云数据处理分析平台LiDAR360 、航空影像拼接软件LiMapper、激光雷达电力巡线LiPowerline, 为电力巡线、林业调查、地形测绘、数字矿山、勘灾应急、构建无人驾驶高精地图等领域提供核心技术解决方案。
LiAir无人机系列激光雷达扫描系统

数字绿土LiAir 250机载激光雷达系统
机载激光雷达采集的点云数据在LiDAR360软件中生成的地形成果
矿业应用
01露天矿
激光扫描获得露天矿三维点云模型;生成DSM/DEM/DOM/DLG等数字地形成果。
利用LiAir激光雷达三维扫描系统快速获得地面物的高精度点云,同时具备良好的机动性、灵活性和安全性,是一种成本低、效率高的料堆体积量测方案。
同步采集影像数据,可以直观进行判别和管理,了解矿山实际开采状况。
02井工矿
对地面沉降区域分段逐次扫描,绘制出大比例尺地形图。通过无人机扫描的面状数据,挖掘变形的微观数据和建立采空区大面积形变模型。
利用无人机激光扫描成果及模型反演不同地层、开采、构造条件下的地表移动变形参数。
建立综合平台,实现对矿区环境监测(地表附着物变化、水体变化、植被变化等)、环保监测(空气能见度监测、着火点监测、局部塌陷监测等)、堆煤面积体积测量、点云快速测图等功能。
产品介绍
LiAir系列产品在垂直空间结构方面的信息提取优势明显,与水平空间数据相结合,可以全方位的监测露天矿山生态环境。无人机LiDAR还可以从井工矿难以接近的上部矿井堆区获取详细而准确的测量数据,非常适合扫描大面积的矿料堆,或类似于采矿设施这样的大型建筑物。
精准跟随地形起伏实现变高飞行,有效解决LiDAR测量距离限制,保障影像分辨率以及LiDAR点云密度一致性。
内置高精度差分GNSS板卡,高精度IMU模块,采用紧耦合差分解算算法,实现点云平面、高程精度厘米级,满足工程测量需求。
支持从精准三维航线规划、点云数据获取、实时飞行监控到点云轨迹解算,航带平差到标准点云成果输出的软硬件一体化解决方案。
无缝对接点云处理软件,快速生成标准地形成果,输出的标准点云可直接进入LiDAR360点云数据处理软件,经自动滤波算法和少量人工编辑即可完成标准地形成果输出,避免中间过程繁琐带来的精度损失。
LiBackpack背包系列激光雷达扫描系统

数字绿土自研LiBackpack C50
背包扫描的巷道点云数据
井工矿应用
产品介绍
LiBackpack C50 为数字绿土自研背负式激光雷达扫描系统,结合激光雷达和同步定位与地图构建技术,无需GNSS即可实时获取周围环境的高精度三维点云数据,尤其适合地下矿恶劣环境下的测量工作。
C50激光雷达扫描系统支持背负和手持两种模式,背负测量方便舒适,手持方式更具灵活性,可手持、可挂在载具上、可安装在延长杆或遥控履带车上,是巷道扫描的不二之选。
数据在手机、平板等移动端实时显示;支持无线/有线方式查看数据;数据传输稳定性强,支持在线闭环以及闭环优化,扫描完成即可导出采集点云数据和运动轨迹。
SLAM 算法稳定和准确性:C50 采用国内领先的SLAM算法,可以很好地适应巷道特征地物少的作业环境,有效保障数据精度。
实时解算:外业测量完毕,初始点云数据即可在LiFuser-BP中预览查看,并完成地理坐标转换、过滤噪声、点云采样等数据预处理,极大简化点云数据分析的繁琐操作。
LiPod大空间三维激光扫描仪

矿业应用
产品介绍
LiPod 大空间扫描仪是数字绿土推出的一款全新系列的产品,该产品采用简约风 格设计,机身小巧、携带方便,集激光扫描、影像采集、GNSS 坐标获取为一体,无需标靶特征,短时间内即可快速采集数据。
主机尺寸小巧,重量仅为 3.0kg,铝合金外壳,配备碳纤维三脚架,设备操作更灵活。
采用高精度的双轴补偿器,拥有更大的补偿范围,不用扫描时每次严格整平,操作更便捷。
集成相机、电子罗盘等各种传感器,拥有多种数据类型,同时无缝匹配各种数据,数据信息更丰富。
通过 WIFI 热点的方式进行设备连接,无需连接线缆,操作更灵活,扫描数据可实时显示在手持设备上,作业更直观。
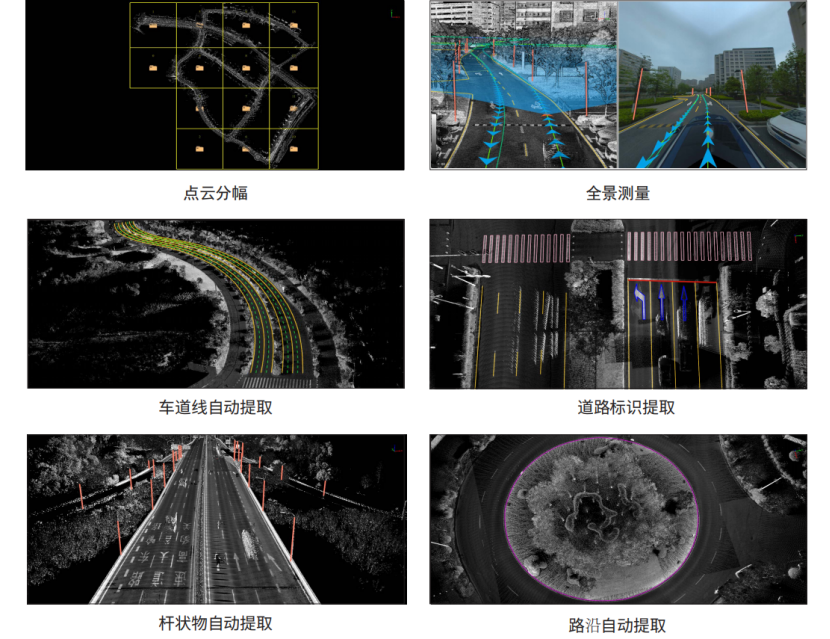
LiStreet地物要素提取及专题智图软件
软件介绍
LiStreet 是数字绿土自主研发的地物要素提取及专题图制作软件,采用自动化和半自动化作业方式对专题数据进行地图矢量化,可衔接多种GIS平台,在城市市政管理、城市部件普查、高精度地图生产、公路勘察设计与改扩建、数字城市构建、数字园林普查等领域可广泛应用,有助于提升城市信息化建设和管理水平。
支撑采矿车无人驾驶,实现高效运输
矿区环境复杂,工作条件恶劣且风险系数高,解决矿区的运输问题,直接关系到矿区的采矿效率,相对封闭的矿区,是无人驾驶最有可能落地的场景之一,一方面无人驾驶可以减少矿区的安全事故,另一方面可以减少司机的人员成本,因此无人矿车的位置标定与矿区地图底图绘制成为重中之重。
激光雷达具有测量精度高、探测范围广等优点的三维激光雷达常被用于制作高精度地图的初始地图模板,即点云地图,它可以为自动驾驶车辆提供先验的地图信息,在高精定位、环境感知、路径规划以及仿真实验中都发挥着重要作用。
矿区无人驾驶系统是一种兼具运营管理、在线状态监测、应急驾驶安全接管等功能的云端化网联自动驾驶集成解决方案,激光雷达技术作为其中重要一环,受到越来越多的重视和关注。
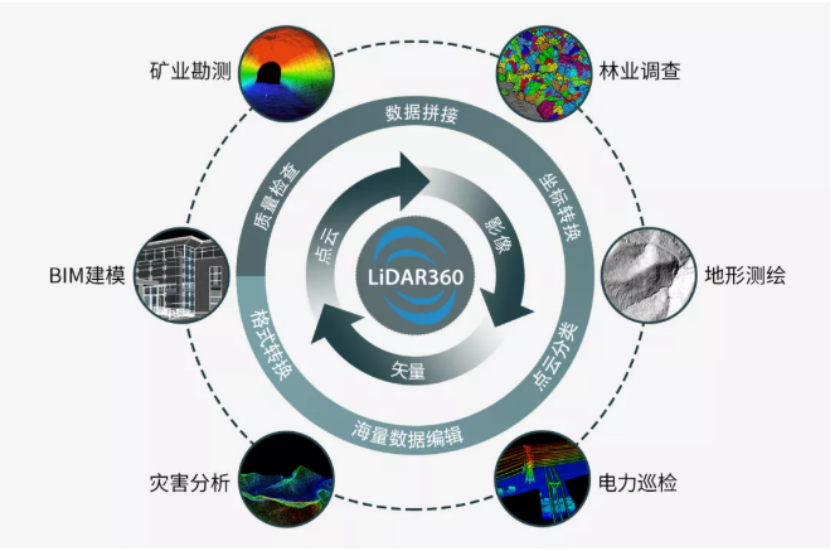
LiDAR360激光雷达点云处理平台
软件介绍
LiDAR360诞生于2013年,是数字绿土自主研发的针对海量激光雷达点云数据的专业处理平台。该款软件提供专业的点云数据处理模块和丰富的数据管理工具,辅以AI和机器学习,可以高效精准地编辑和分析机载、车载、地基、手持等多采集平台获取的具有不同格式类型的点云数据,并生成面向众多行业的专业地理空间产品,形成便捷、高效的行业解决方案。
LiDAR360矿山模块
基于机载、背包等多平台矿山实时三维点云数据,通过LiDAR360测量模块和地形分析模块可实现露天矿山的开采路径变换检测,开采作业量定量分析以及开采规划辅助决策;同时,可实现地下矿巷道定期监测分析,辅助事故预警决策。
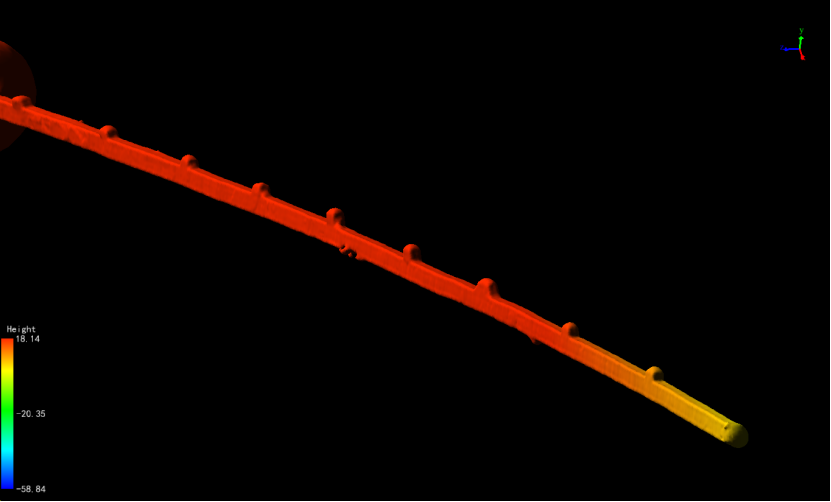
巷道建模效果图
巷道断面分析
基于点云数据在LiDAR360中生成巷道的高保真三维模型,对比标准(参考)截面和扫描(点云衍生)截面差异值,从而进行巷道形变监测。
矿堆体积量测
利用三维激光扫描系统对堆积物进行观测,快速获取大量矿石表面点的三维坐标,软件根据微积分原理,可以精确地计算出矿堆的体积。
三维建模
用于处理矿山、隧道、巷道等点云数据,通过切片过滤技术,去除被扫描表面噪点信息,结合三角网建模或泊松建模,快速获取巷道数据平滑且一致性良好的三角网模型。
方案整体优势:
完整的3D解决方案,包括先进的软件、完善的硬件、以客户为中心的专业技术支持。
地面及地下多场景采集数据,兼顾实用与安全。
三维可视化模型,用于控制开采进度、仿真制图、数字化资产管理等。
LiDAR360提供点云分类、体积量测、巷道建模、断面分析等其他相关功能。
精简工程人员数量,提高作业效率,缩短成图时间,快速获得可交付成果。
全方位扫描,实时显示扫描结果,根据三维模型计算填充量,有效控制成本。
 微信公众号
微信公众号