第一章
摘要
前文“矿区无人驾驶参与者分析”讲述了矿区无人驾驶的参与者,以及他们的不同关注点。本文将从技术的角度出发,首先介绍自动驾驶的三个核心系统,然后讲述无人驾驶的线控技术及其原理,接着总结了矿区无人驾驶技术落地的三种方案,最后站在智慧矿区的角度,对矿区无人驾驶的技术难点进行了阐述。
第二章
智能驾驶的三个核心系统
无人驾驶车辆真要跑起来,需要解决感知、决策和执行等层面的技术问题。感知系统也称为“中层控制系统”,负责感知周围的环境,并进行识别和分析;决策系统也称为“上层控制系统”,负责路径规划和导航;执行系统又称为“底层控制系统”,负责汽车的加速、刹车和转向。
/自动驾驶的感知系统/
感知系统的输入设备具体包括光学摄像头、光学雷达(LiDAR)、微波雷达、导航系统等。这些传感器收集周围的信息,为感知系统提供全面的环境数据。
光学摄像头是目前最便宜也是最常用的车载传感器,它的一大优点就是可以分辨颜色,因此也成为场景解读的绝佳工具。但其缺点也很明显:1.缺乏“深度”这一维度,没有立体视觉就无法判断物体和相机(可以换算为车辆)间的距离;2.对光线过于敏感,过暗或过强的光线以及二者之间的快速切变,比如驶入和驶出隧道都足以影响它的成像。
激光雷达,即利用激光来进行探测和测量。其原理是向周围发射脉冲激光,遇到物体后反射回来,通过来回的时间差,计算出距离,从而对周围环境建立起三维模型。激光雷达探测精度高、距离长;由于激光的波长短,所以可以探测到非常微小的目标,并且探测距离很长。
光学摄像头和雷达测量在感知环境中相辅相成,共同为无人驾驶车辆提供完整、准确的外部信息。有了“眼睛”接收信息,接下来就是利用深度学习等手段对信息进行识别。将多种传感器的信息相互融合并不是一件容易的事情,可以利用韦伯斯的误差反向传播算法和先进的数字摄像技术对外界事物进行准确识别。
自动驾驶的感知系统不仅包括它的“眼睛”,还包括它的“大脑”——高精度地图。人类驾驶者会调用记忆中熟悉的道路场景来辅助驾驶,自动驾驶也会通过高精度地图获取必要的环境信息特别是相对固定、更新周期较长的信息,如交通信号灯(请注意,这里是指物理的“灯”本身而非“灯的信号”即红、黄、绿)、车道标记、路缘等。
/自动驾驶的决策系统/
自动驾驶决策系统负责路线规划和实时导航,这里主要涉及高精度地图,又称“高清数字地图”。无人驾驶汽车用的并不是普通的导航地图,它在精确度和信息量上与普通地图差别很大,因而被称为“高精度地图”。高清数字地图的精度一般在厘米级,而且是立体三维的,包含车道线、周围设施的坐标位置等行车辅助信息。
自动驾驶的决策系统不仅需要独立的“智能车辆”,也需要“智能交通系统”的支持,如V2V等。在高精度地图之外,另一个支持路径规划的技术是V2X,一般认为它是在V2I的基础上发展起来的。V2X意指将车辆和环境形成一个“物联网”,包括车对车、车对基础设施,以及车对行人等一系列通信系统。
有了高精度数字地图和V2X通信网络,系统就可以应用搜索算法评估各种驾驶行为所花费的成本,包括信号灯等待时间、道路拥堵情况、路面维修情况等,以此获得最佳行驶路径。
/自动驾驶的执行系统/
执行系统也是底层控制系统,负责执行汽车的刹车、加速、转向的具体操作。工程师们通过特制的“线控装置”控制方向盘和油门,取代人类司机的手和脚,并配置多个处理器组成的子系统,以此来稳定、准确地控制汽车的机械系统。这些子系统,包括引擎控制单元(ECU)、制动防抱死系统(ABS)、自动变速箱控制系统(TCU)等,它们通过一个“总线”来进行内部通信,在汽车中称作CAN总线协议。
通过以上感知、决策与执行三个系统分工合作,责任明确地控制汽车的运行,就可以使无人驾驶汽车具备理论上“行驶”的条件。
第三章
自动驾驶的线控技术
自动驾驶感知识别、决策规划、控制执行三个核心系统中,和传统汽车零部件行业贴合最近的就是控制执行端,说的再明确一些就是驱动控制、转向控制、制动控制等。自动驾驶的路径规划等驾驶决策是由传感器根据实际的道路交通情况进行识别进而得出,都会是电信号,这就需要传统汽车的底盘进行线控的改造而适用于自动驾驶。
线控底盘主要有五大系统,分别为线控转向、线控制动、线控换挡、线控油门、线控悬挂。而转向和制动则是面向自动驾驶执行端方向最核心的产品,其中又以制动技术难度更高。
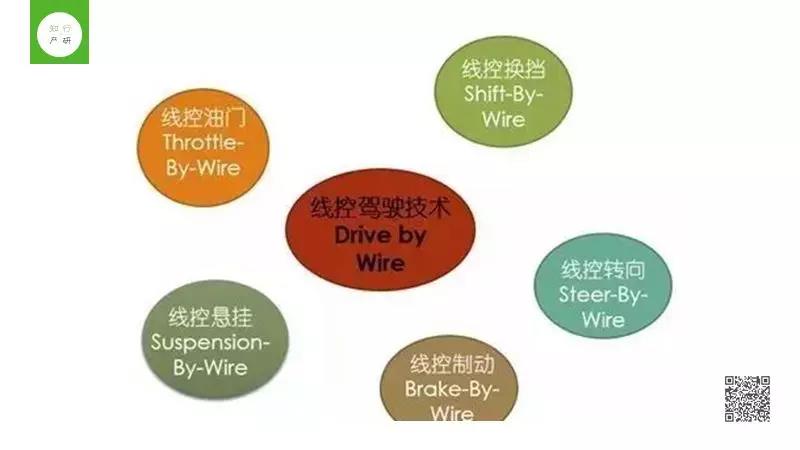
图1 面向自动驾驶线控底盘组成
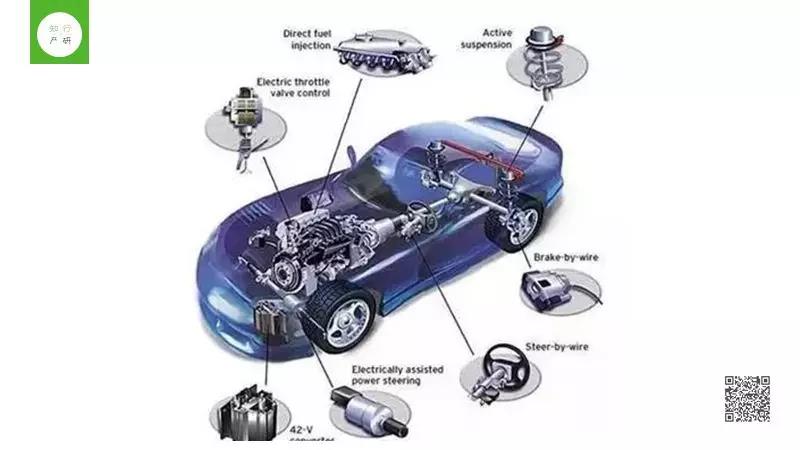
图2 线控底盘组成
/线控技术现状概述/
(1)线控油门
当前线控油门或电子油门技术已经成熟。针对传统燃油车,线控油门现在基本是标准配置,混合动力和电动汽车中都是线控油门,基本不需要换挡,若有也会是线控。
电子油门控制系统经过这么多年的发展,已经不是最初的电机控制节气门概念了,而逐渐发展成为根据油门踏板的位置,ECU来决定节气门的开合大小以及喷油量、喷油时间间隔,早已经完成的电子线控化。
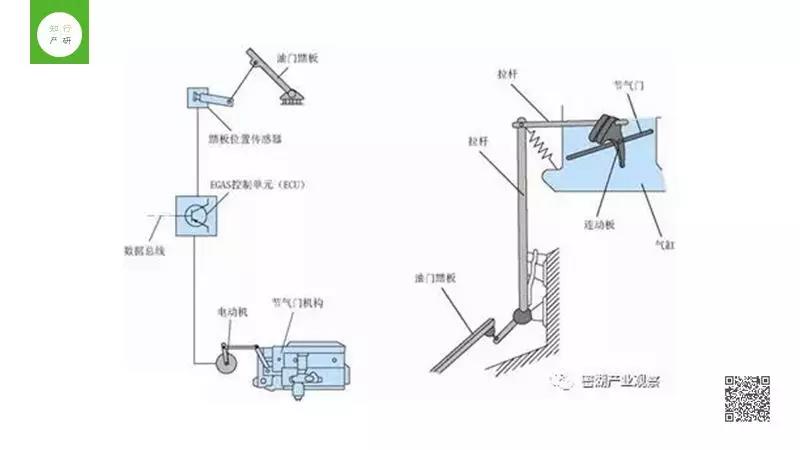
图3 传统油门踏板与电子油门控制系统对比
(2)线控换挡
线控换挡当前技术由传统的机械手动档位变化为手柄、拨杆、转盘、按钮等电子信号输出的方式。线控换挡对燃油车自动变速器的控制方式不会改变,技术难度小,行业格局比较稳定,新进企业有一定机会,但需要与客户深度绑定,该技术对自动驾驶影响不大。
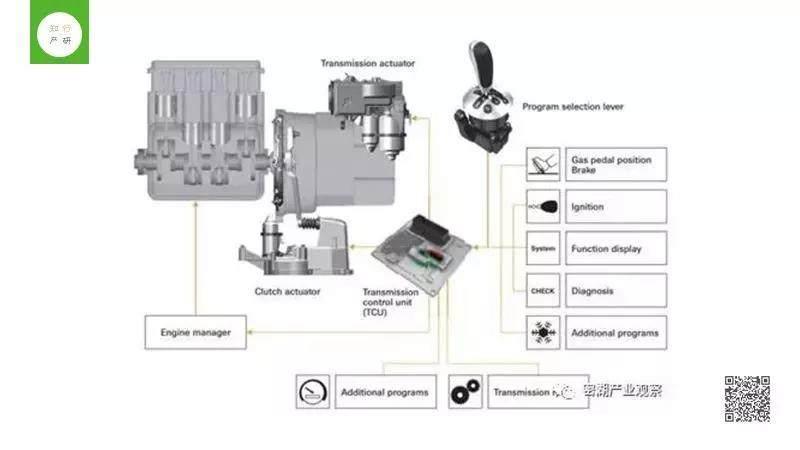
图4 燃油车发动机与变速器控制系统

图5 线控换挡的执行机构形式
(3)线控空气悬架
当前技术已经比较成熟,受限于成本目前绝大多数应用于高端车辆,与自动驾驶关系不大,行业格局稳定。组成部件主要有:空气弹簧、储气罐、高度传感器、减震器、气泵、电控单元。下面两图能够看到传统车辆的悬挂与空气悬挂的对比,可以看到相对传统悬架,空气悬架增多了汽车电子的控制系统。
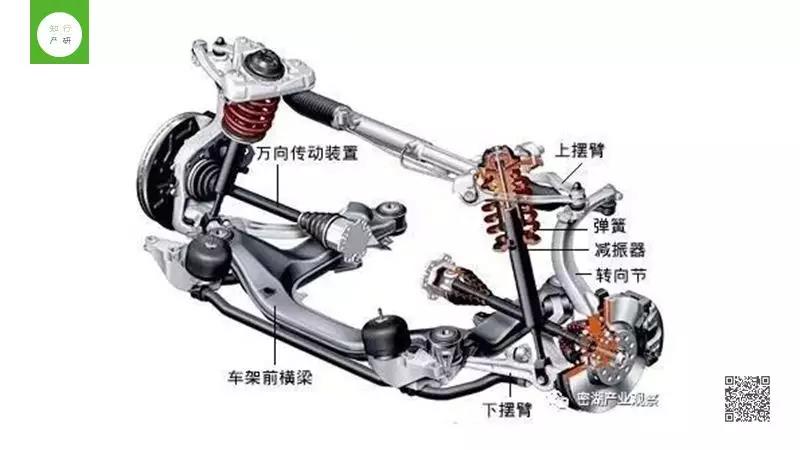
图6 传统汽车悬挂

图7 空气悬挂系统
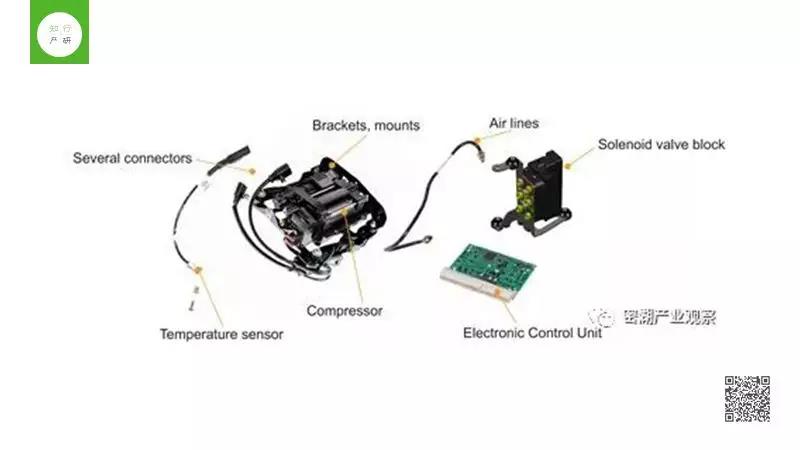
图8 非集成式空气悬挂控制系统

图9 集成式空气悬挂控制系统
(4)线控转向系统
SBW(steering by wire)的发展与EPS一脉相承,其所用到的关键部件在EPS中一样有应用,其系统相对于EPS需要有冗余功能。
目前SBW系统有两种方式:
取消方向盘与转向执行机构的机械连接,通过多个电机和控制器来增加系统的冗余度
在方向盘与转向执行机构之间增加一个电磁离合器作为失效备份,来增加系统的冗余度

图10 传统EPS系统组成
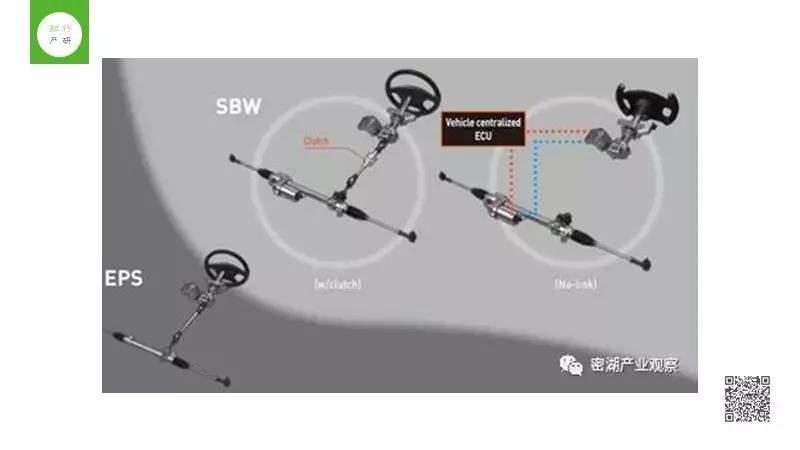
图11 SBW系统的两种方式

图12 Bosch面向自动驾驶的线控转向系统架构

图13 博世SBW的电机冗余备份系统
(5)线控制动系统
BBW(Brake by Wire)线控制动系统也分为两种类型:
• EHB: Electro Hydraulic Brake, EHB系统的控制单元及执行机构布置的比较集中,并且使用制动液作为动力传递媒介,有液压备份系统,也可以称之为:集中式、湿式制动系统,发展相对成熟;
• EMB: Electro Mechanical Brake采用电子机械装置代替液压管路,执行机构通常安在轮边,也可称为:分布式、干式制动系统。
BBW系统与传统液压式刹车系统, ABS, ESC等产品的技术积累正相关,属于核心的安全部件,进入壁垒高于转向系统。
线控制动系统是在传统的制动系统上发展而来的,下两图可以看到线控制动系统和传统制动系统的对比。线控制动系统执行信息由电信号传递,相对来讲制动压力相应的更快,进而刹车距离更短更安全,车辆操控性更好。
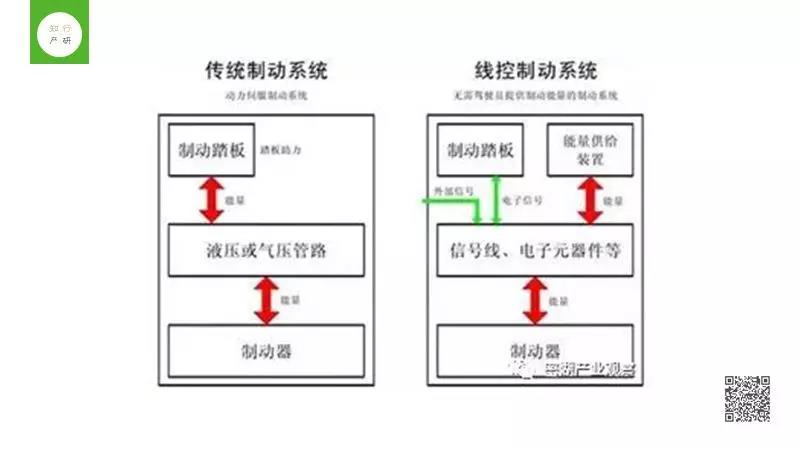
图14 传统制动系统与线控制动系统对比
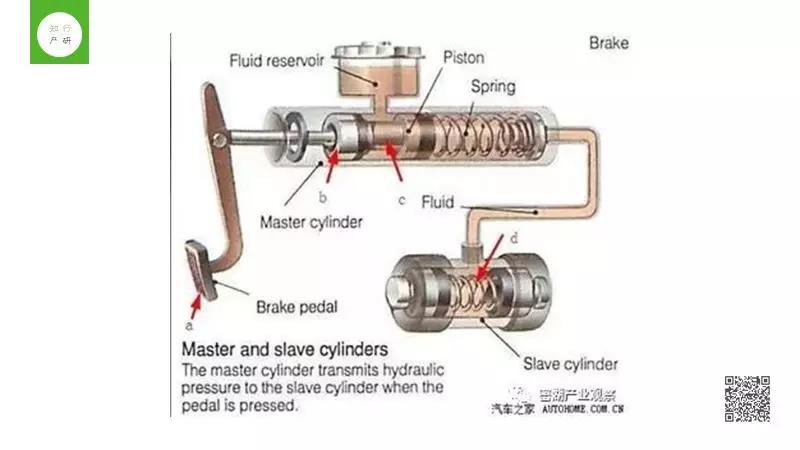
图15 传统制动系统结构图图
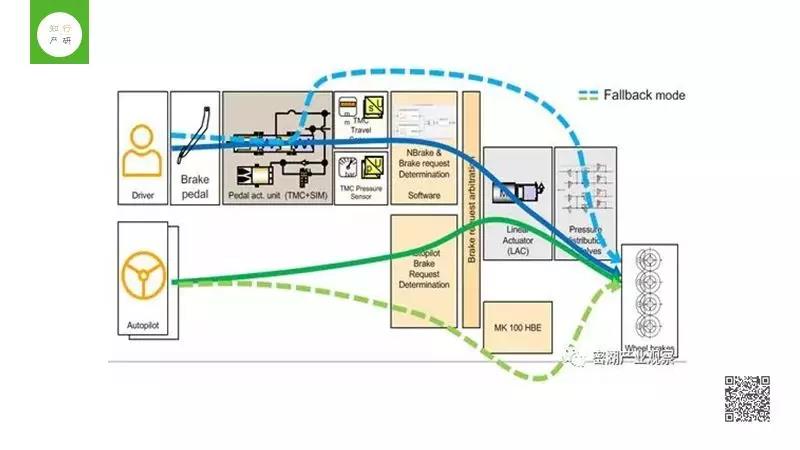
图16 传统制动系统与电液制动系统对比与响应时间对比
自动驾驶现在轰轰烈烈的在发展,似乎全球车企都对此产生了焦虑症,担心自动驾驶的产业重构会让企业落后于时代。从执行端来看,线控油门、线控换挡、线控空气悬挂虽然技术都很成熟了,但最为关键的转向和制动系统目前还没有一套可以适用于L4驾驶的稳定的量产产品。
在矿卡领域,自动驾驶的执行机构零部件供应少之又少,这导致矿区无人驾驶的实现难度进一步加大。
第四章
国内矿区无人驾驶落地技术方案
针对矿区而言,一方面国内矿区无人驾驶的研究起步较晚,另一方面由于矿卡的很多零部件都依赖进口,国产化程度低,参与研制的国内企业也少;所以导致针对矿区的针对矿区场景的感知、决策、执行系统研发较少,也导致矿卡零部件的开放程度低,系统融合难度大。
根据媒体公开报道的资料来看,目前矿区落地的自动驾驶项目主要有远程驾驶、机器人驾驶、智能驾驶三种不同得技术方案。其中远程驾驶最容易实现,机器人驾驶是低成本的线控替代方案,智能驾驶的落地难度最大。
(1)远程驾驶
远程驾驶最先应用在地下矿井的无人驾驶技术,驾驶员在办公室即可以操作矿卡,这大大减低了井下矿的安全风险,所以在行业内得到了大规模应用。
远程技术的技术实现说明:1)感知部分:用高清摄像头对车辆行驶的实时信息进行图像传回;2)决策部分:驾驶员通过传回的图像,做出决策判断,完成加速、减速、停车等具体工况;3)执行部分:虚拟驾驶舱将驾驶员的动作信息转化为电信号,传递到汽车底盘,实现执行控制。
这种技术相对简单,洛阳钼业使用的跃薪智能的无人驾驶矿卡,使用的就是这种方案。由于矿卡工况简单,可以实现一人掌管多台车的功效,不仅减少了安全事故的发生,也减低了人力成本。
(2)机器人驾驶
从自动驾驶的专业视角来看,用机器人代替人,来实现自动驾驶的功能,完全是多此一举。因为驾驶员是一个要求非常高的岗位,造出一个可以替代人完成驾驶任务的机器人,本身不是一件容易的事情。但是由于矿卡运行工况的特殊性,以及针对大型矿卡的线控改造难度,使得机器人方案在矿卡上占有一席之地。
踏歌智行就是机器人方案的代表之一,由于改造成本不高,改造难度不大,所以这个方案在市场上还有一席之地。但是从长远的角度来看,机器人方案的可靠性有待商榷,而且随着执行机构的磨损,也会存在一定的误差,会导致后期的维护成本居高不下。

(3)智能驾驶
智能驾驶就是按照感知、决策、执行三个系统的高效配合,来实现智能驾驶的功能。在这个方案种,多传感器的融合技术、车联网技术、决策规划技术、线控改造技术等都是需要重点突破的技术。最重要的,矿区智能驾驶的实现,还是要依赖于场景的落地。
商用车的智能驾驶技术与乘用车不尽相同,同样,由于封闭场景有别于城市场景、高速场景,所以需要针对矿区领域做针对性的自动驾驶技术开发、测试。目前而言,国内还没有真正落地智能驾驶技术的场景。
但是由于工作环境的恶劣,矿卡司机招聘越来越难,所以无人驾驶矿卡产业链的各个参与者都非常的重视。
第五章
矿区无人驾驶技术难点分析
从无人驾驶的角度来看,矿区无人驾驶至少要经过三个阶段:1)单台矿卡无人化,2)矿卡自动调度,3)矿区其他机械无人化。从智慧矿区的角度来看,整体的矿区无人化应该包括四个方面:生产工艺自动化、物流管理智能化、固定设施无人化、生产管理全面信息化。
总的来讲,矿区无人驾驶还有很多问题需要突破,具体有:
(1)矿卡自动驾驶:如果说矿区无人驾驶可以通过远程驾驶来实现,那么如何使得矿卡自动驾驶?如何实现车辆的编组与自动调度。
(2)矿区其他移动装备的无人化:装载设备、爆破设备、清障设备、洒水设备的整体无人化,他们的路径如何规划,如何实现装备之间的智能交互。
(3)传统智慧矿区技术与自动驾驶技术融合:高清地图、三维建模、卡车调度系统、矿区通信系统等如何融合。
第六章
小结
智慧矿区是国家一直在推动的方向,智能驾驶也是未来的大势所趋。由于智能驾驶的火爆,各种智能驾驶公司纷纷看重露天矿区汽车的运行工况简单,自动驾驶最容易落地,因此都把矿区解决方案纳入到自己的业务范围。
其实矿区无人驾驶比我们现象中的复杂很多,如果不懂矿区,想要做好矿区无人驾驶,难度可想而知。矿区无人驾驶要想商业化落地,必须与矿区的实际需求相结合,先解决矿区目前迫切需要解决的问题,然后再一步一步升级迭代,最终实现无人矿区、智慧矿区。
第一章
摘要
前文“矿区无人驾驶参与者分析”讲述了矿区无人驾驶的参与者,以及他们的不同关注点。本文将从技术的角度出发,首先介绍自动驾驶的三个核心系统,然后讲述无人驾驶的线控技术及其原理,接着总结了矿区无人驾驶技术落地的三种方案,最后站在智慧矿区的角度,对矿区无人驾驶的技术难点进行了阐述。
第二章
智能驾驶的三个核心系统
无人驾驶车辆真要跑起来,需要解决感知、决策和执行等层面的技术问题。感知系统也称为“中层控制系统”,负责感知周围的环境,并进行识别和分析;决策系统也称为“上层控制系统”,负责路径规划和导航;执行系统又称为“底层控制系统”,负责汽车的加速、刹车和转向。
/自动驾驶的感知系统/
感知系统的输入设备具体包括光学摄像头、光学雷达(LiDAR)、微波雷达、导航系统等。这些传感器收集周围的信息,为感知系统提供全面的环境数据。
光学摄像头是目前最便宜也是最常用的车载传感器,它的一大优点就是可以分辨颜色,因此也成为场景解读的绝佳工具。但其缺点也很明显:1.缺乏“深度”这一维度,没有立体视觉就无法判断物体和相机(可以换算为车辆)间的距离;2.对光线过于敏感,过暗或过强的光线以及二者之间的快速切变,比如驶入和驶出隧道都足以影响它的成像。
激光雷达,即利用激光来进行探测和测量。其原理是向周围发射脉冲激光,遇到物体后反射回来,通过来回的时间差,计算出距离,从而对周围环境建立起三维模型。激光雷达探测精度高、距离长;由于激光的波长短,所以可以探测到非常微小的目标,并且探测距离很长。
光学摄像头和雷达测量在感知环境中相辅相成,共同为无人驾驶车辆提供完整、准确的外部信息。有了“眼睛”接收信息,接下来就是利用深度学习等手段对信息进行识别。将多种传感器的信息相互融合并不是一件容易的事情,可以利用韦伯斯的误差反向传播算法和先进的数字摄像技术对外界事物进行准确识别。
自动驾驶的感知系统不仅包括它的“眼睛”,还包括它的“大脑”——高精度地图。人类驾驶者会调用记忆中熟悉的道路场景来辅助驾驶,自动驾驶也会通过高精度地图获取必要的环境信息特别是相对固定、更新周期较长的信息,如交通信号灯(请注意,这里是指物理的“灯”本身而非“灯的信号”即红、黄、绿)、车道标记、路缘等。
/自动驾驶的决策系统/
自动驾驶决策系统负责路线规划和实时导航,这里主要涉及高精度地图,又称“高清数字地图”。无人驾驶汽车用的并不是普通的导航地图,它在精确度和信息量上与普通地图差别很大,因而被称为“高精度地图”。高清数字地图的精度一般在厘米级,而且是立体三维的,包含车道线、周围设施的坐标位置等行车辅助信息。
自动驾驶的决策系统不仅需要独立的“智能车辆”,也需要“智能交通系统”的支持,如V2V等。在高精度地图之外,另一个支持路径规划的技术是V2X,一般认为它是在V2I的基础上发展起来的。V2X意指将车辆和环境形成一个“物联网”,包括车对车、车对基础设施,以及车对行人等一系列通信系统。
有了高精度数字地图和V2X通信网络,系统就可以应用搜索算法评估各种驾驶行为所花费的成本,包括信号灯等待时间、道路拥堵情况、路面维修情况等,以此获得最佳行驶路径。
/自动驾驶的执行系统/
执行系统也是底层控制系统,负责执行汽车的刹车、加速、转向的具体操作。工程师们通过特制的“线控装置”控制方向盘和油门,取代人类司机的手和脚,并配置多个处理器组成的子系统,以此来稳定、准确地控制汽车的机械系统。这些子系统,包括引擎控制单元(ECU)、制动防抱死系统(ABS)、自动变速箱控制系统(TCU)等,它们通过一个“总线”来进行内部通信,在汽车中称作CAN总线协议。
通过以上感知、决策与执行三个系统分工合作,责任明确地控制汽车的运行,就可以使无人驾驶汽车具备理论上“行驶”的条件。
第三章
自动驾驶的线控技术
自动驾驶感知识别、决策规划、控制执行三个核心系统中,和传统汽车零部件行业贴合最近的就是控制执行端,说的再明确一些就是驱动控制、转向控制、制动控制等。自动驾驶的路径规划等驾驶决策是由传感器根据实际的道路交通情况进行识别进而得出,都会是电信号,这就需要传统汽车的底盘进行线控的改造而适用于自动驾驶。
线控底盘主要有五大系统,分别为线控转向、线控制动、线控换挡、线控油门、线控悬挂。而转向和制动则是面向自动驾驶执行端方向最核心的产品,其中又以制动技术难度更高。
图1 面向自动驾驶线控底盘组成
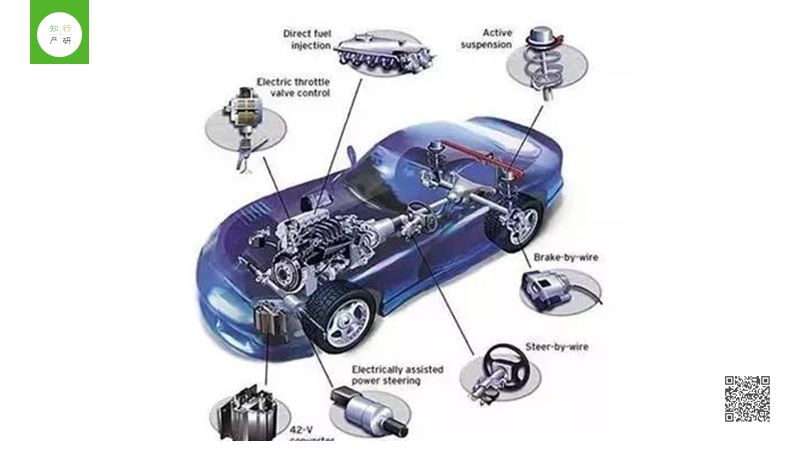
图2 线控底盘组成
/线控技术现状概述/
(1)线控油门
当前线控油门或电子油门技术已经成熟。针对传统燃油车,线控油门现在基本是标准配置,混合动力和电动汽车中都是线控油门,基本不需要换挡,若有也会是线控。
电子油门控制系统经过这么多年的发展,已经不是最初的电机控制节气门概念了,而逐渐发展成为根据油门踏板的位置,ECU来决定节气门的开合大小以及喷油量、喷油时间间隔,早已经完成的电子线控化。
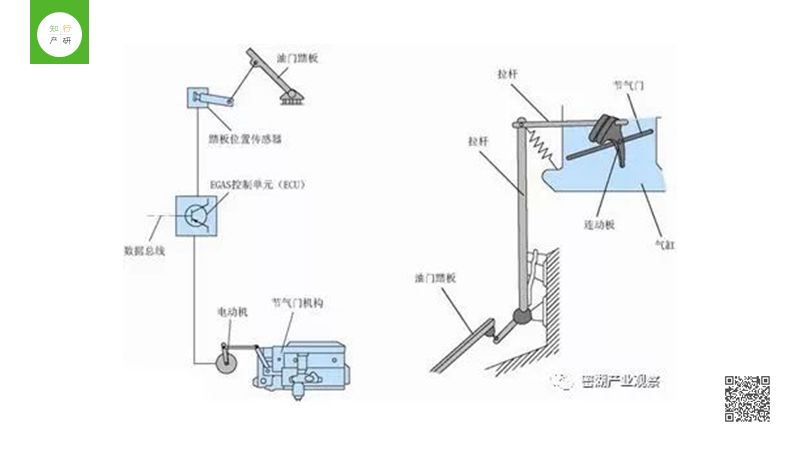
图3 传统油门踏板与电子油门控制系统对比
(2)线控换挡
线控换挡当前技术由传统的机械手动档位变化为手柄、拨杆、转盘、按钮等电子信号输出的方式。线控换挡对燃油车自动变速器的控制方式不会改变,技术难度小,行业格局比较稳定,新进企业有一定机会,但需要与客户深度绑定,该技术对自动驾驶影响不大。
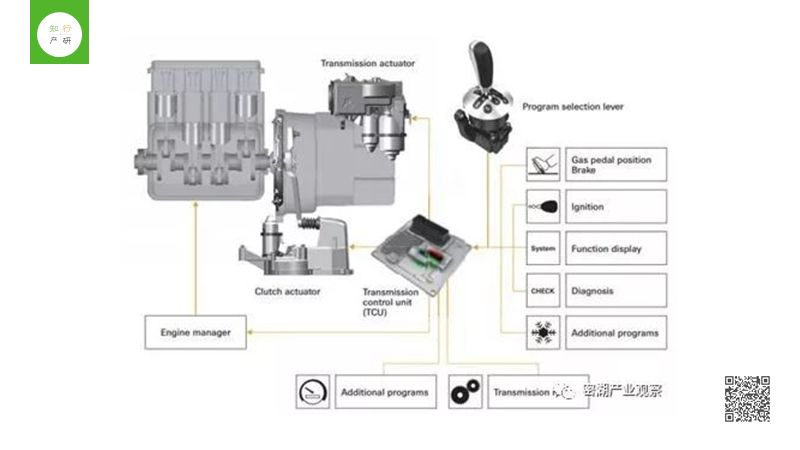
图4 燃油车发动机与变速器控制系统

图5 线控换挡的执行机构形式
(3)线控空气悬架
当前技术已经比较成熟,受限于成本目前绝大多数应用于高端车辆,与自动驾驶关系不大,行业格局稳定。组成部件主要有:空气弹簧、储气罐、高度传感器、减震器、气泵、电控单元。下面两图能够看到传统车辆的悬挂与空气悬挂的对比,可以看到相对传统悬架,空气悬架增多了汽车电子的控制系统。
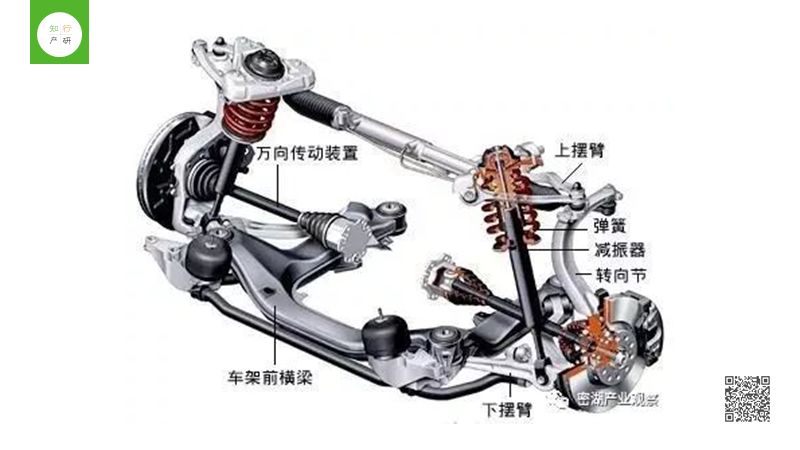
图6 传统汽车悬挂

图7 空气悬挂系统
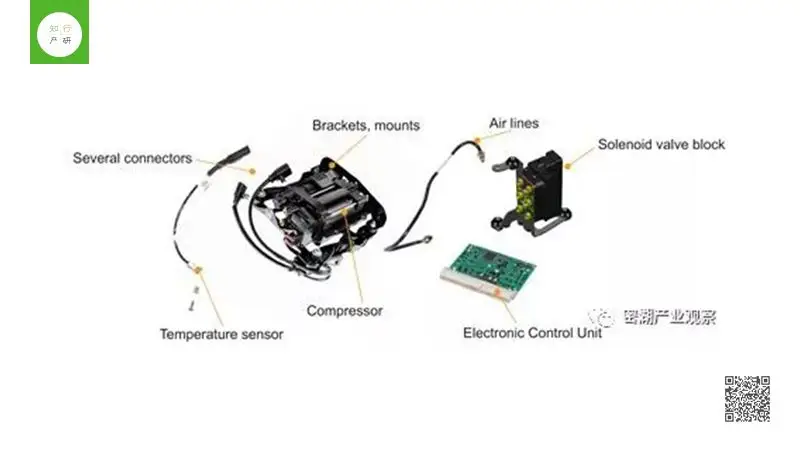
图8 非集成式空气悬挂控制系统

图9 集成式空气悬挂控制系统
(4)线控转向系统
SBW(steering by wire)的发展与EPS一脉相承,其所用到的关键部件在EPS中一样有应用,其系统相对于EPS需要有冗余功能。
目前SBW系统有两种方式:
取消方向盘与转向执行机构的机械连接,通过多个电机和控制器来增加系统的冗余度
在方向盘与转向执行机构之间增加一个电磁离合器作为失效备份,来增加系统的冗余度
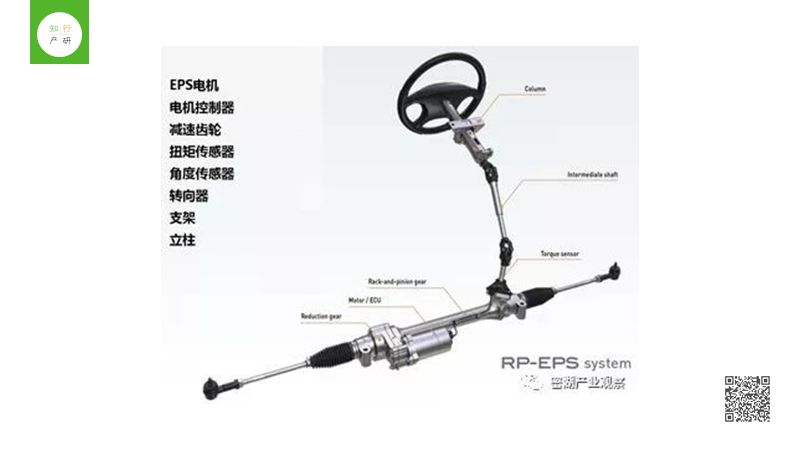
图10 传统EPS系统组成
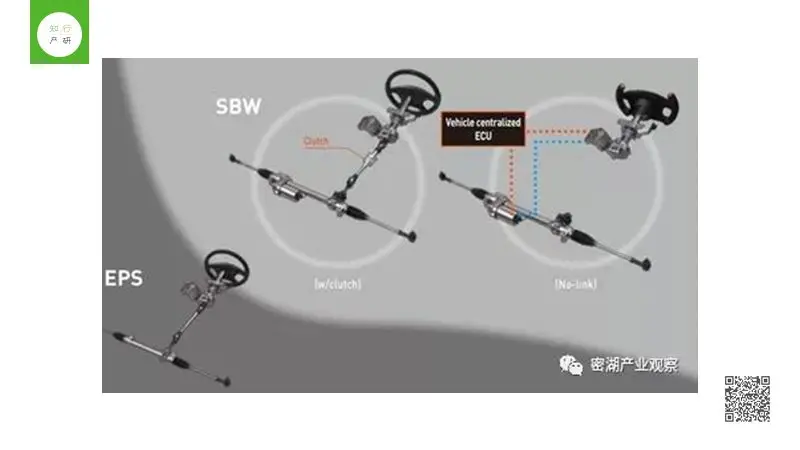
图11 SBW系统的两种方式

图12 Bosch面向自动驾驶的线控转向系统架构
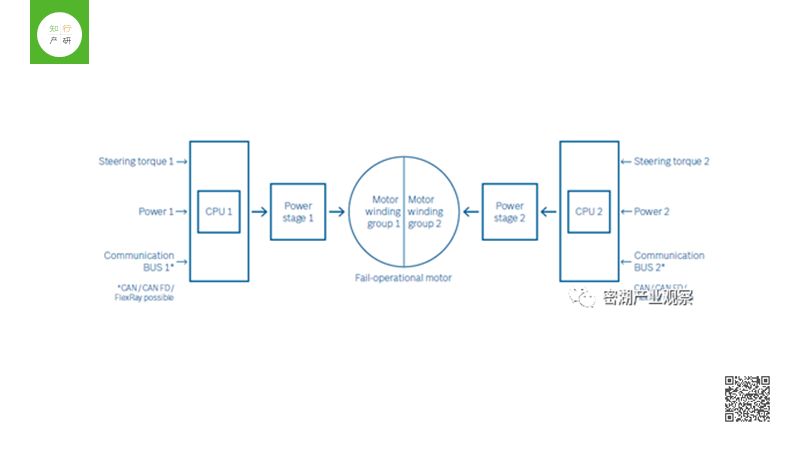
图13 博世SBW的电机冗余备份系统
(5)线控制动系统
BBW(Brake by Wire)线控制动系统也分为两种类型:
• EHB: Electro Hydraulic Brake, EHB系统的控制单元及执行机构布置的比较集中,并且使用制动液作为动力传递媒介,有液压备份系统,也可以称之为:集中式、湿式制动系统,发展相对成熟;
• EMB: Electro Mechanical Brake采用电子机械装置代替液压管路,执行机构通常安在轮边,也可称为:分布式、干式制动系统。
BBW系统与传统液压式刹车系统, ABS, ESC等产品的技术积累正相关,属于核心的安全部件,进入壁垒高于转向系统。
线控制动系统是在传统的制动系统上发展而来的,下两图可以看到线控制动系统和传统制动系统的对比。线控制动系统执行信息由电信号传递,相对来讲制动压力相应的更快,进而刹车距离更短更安全,车辆操控性更好。
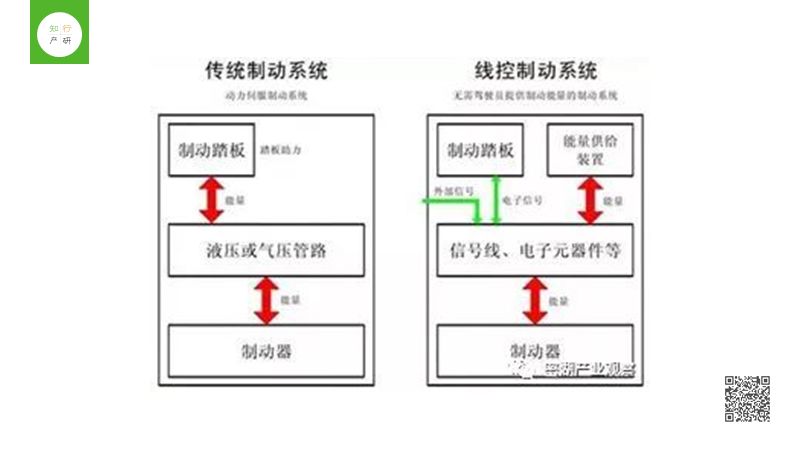
图14 传统制动系统与线控制动系统对比
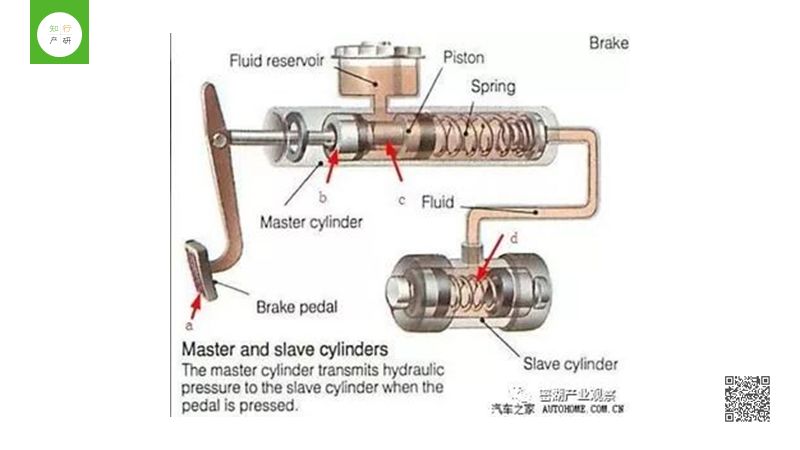
图15 传统制动系统结构图图
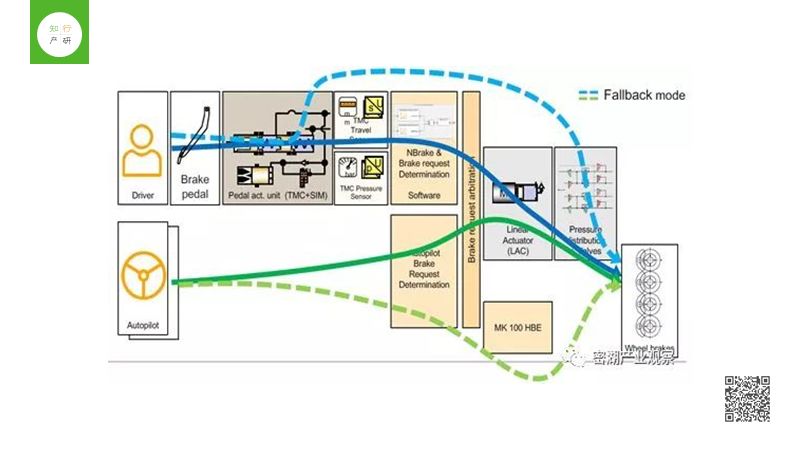
图16 传统制动系统与电液制动系统对比与响应时间对比
自动驾驶现在轰轰烈烈的在发展,似乎全球车企都对此产生了焦虑症,担心自动驾驶的产业重构会让企业落后于时代。从执行端来看,线控油门、线控换挡、线控空气悬挂虽然技术都很成熟了,但最为关键的转向和制动系统目前还没有一套可以适用于L4驾驶的稳定的量产产品。
在矿卡领域,自动驾驶的执行机构零部件供应少之又少,这导致矿区无人驾驶的实现难度进一步加大。
第四章
国内矿区无人驾驶落地技术方案
针对矿区而言,一方面国内矿区无人驾驶的研究起步较晚,另一方面由于矿卡的很多零部件都依赖进口,国产化程度低,参与研制的国内企业也少;所以导致针对矿区的针对矿区场景的感知、决策、执行系统研发较少,也导致矿卡零部件的开放程度低,系统融合难度大。
根据媒体公开报道的资料来看,目前矿区落地的自动驾驶项目主要有远程驾驶、机器人驾驶、智能驾驶三种不同得技术方案。其中远程驾驶最容易实现,机器人驾驶是低成本的线控替代方案,智能驾驶的落地难度最大。
(1)远程驾驶
远程驾驶最先应用在地下矿井的无人驾驶技术,驾驶员在办公室即可以操作矿卡,这大大减低了井下矿的安全风险,所以在行业内得到了大规模应用。
远程技术的技术实现说明:1)感知部分:用高清摄像头对车辆行驶的实时信息进行图像传回;2)决策部分:驾驶员通过传回的图像,做出决策判断,完成加速、减速、停车等具体工况;3)执行部分:虚拟驾驶舱将驾驶员的动作信息转化为电信号,传递到汽车底盘,实现执行控制。
这种技术相对简单,洛阳钼业使用的跃薪智能的无人驾驶矿卡,使用的就是这种方案。由于矿卡工况简单,可以实现一人掌管多台车的功效,不仅减少了安全事故的发生,也减低了人力成本。
(2)机器人驾驶
从自动驾驶的专业视角来看,用机器人代替人,来实现自动驾驶的功能,完全是多此一举。因为驾驶员是一个要求非常高的岗位,造出一个可以替代人完成驾驶任务的机器人,本身不是一件容易的事情。但是由于矿卡运行工况的特殊性,以及针对大型矿卡的线控改造难度,使得机器人方案在矿卡上占有一席之地。
踏歌智行就是机器人方案的代表之一,由于改造成本不高,改造难度不大,所以这个方案在市场上还有一席之地。但是从长远的角度来看,机器人方案的可靠性有待商榷,而且随着执行机构的磨损,也会存在一定的误差,会导致后期的维护成本居高不下。

(3)智能驾驶
智能驾驶就是按照感知、决策、执行三个系统的高效配合,来实现智能驾驶的功能。在这个方案种,多传感器的融合技术、车联网技术、决策规划技术、线控改造技术等都是需要重点突破的技术。最重要的,矿区智能驾驶的实现,还是要依赖于场景的落地。
商用车的智能驾驶技术与乘用车不尽相同,同样,由于封闭场景有别于城市场景、高速场景,所以需要针对矿区领域做针对性的自动驾驶技术开发、测试。目前而言,国内还没有真正落地智能驾驶技术的场景。
但是由于工作环境的恶劣,矿卡司机招聘越来越难,所以无人驾驶矿卡产业链的各个参与者都非常的重视。
第五章
矿区无人驾驶技术难点分析
从无人驾驶的角度来看,矿区无人驾驶至少要经过三个阶段:1)单台矿卡无人化,2)矿卡自动调度,3)矿区其他机械无人化。从智慧矿区的角度来看,整体的矿区无人化应该包括四个方面:生产工艺自动化、物流管理智能化、固定设施无人化、生产管理全面信息化。
总的来讲,矿区无人驾驶还有很多问题需要突破,具体有:
(1)矿卡自动驾驶:如果说矿区无人驾驶可以通过远程驾驶来实现,那么如何使得矿卡自动驾驶?如何实现车辆的编组与自动调度。
(2)矿区其他移动装备的无人化:装载设备、爆破设备、清障设备、洒水设备的整体无人化,他们的路径如何规划,如何实现装备之间的智能交互。
(3)传统智慧矿区技术与自动驾驶技术融合:高清地图、三维建模、卡车调度系统、矿区通信系统等如何融合。
第六章
小结
智慧矿区是国家一直在推动的方向,智能驾驶也是未来的大势所趋。由于智能驾驶的火爆,各种智能驾驶公司纷纷看重露天矿区汽车的运行工况简单,自动驾驶最容易落地,因此都把矿区解决方案纳入到自己的业务范围。
其实矿区无人驾驶比我们现象中的复杂很多,如果不懂矿区,想要做好矿区无人驾驶,难度可想而知。矿区无人驾驶要想商业化落地,必须与矿区的实际需求相结合,先解决矿区目前迫切需要解决的问题,然后再一步一步升级迭代,最终实现无人矿区、智慧矿区。
 微信公众号
微信公众号